
Category Archives: Arduino
Max6675 Thermocouple Arduino Code
#include "Max6675.h"
Max6675 ts(8, 9, 10);
// Max6675 module: SO on pin #8, SS on pin #9, CSK on pin #10 of Arduino UNO
void setup()
{
ts.setOffset(0);
// set offset for temperature measurement.
Serial.begin(9600);
}
void loop()
{
Serial.print(ts.getCelsius(), 2);
Serial.print(" C / ");
Serial.print(ts.getFahrenheit(), 2);
Serial.print(" F / ");
Serial.print(ts.getKelvin(), 2);
Serial.print(" Kn");
Serial.println();
delay(2000);
}
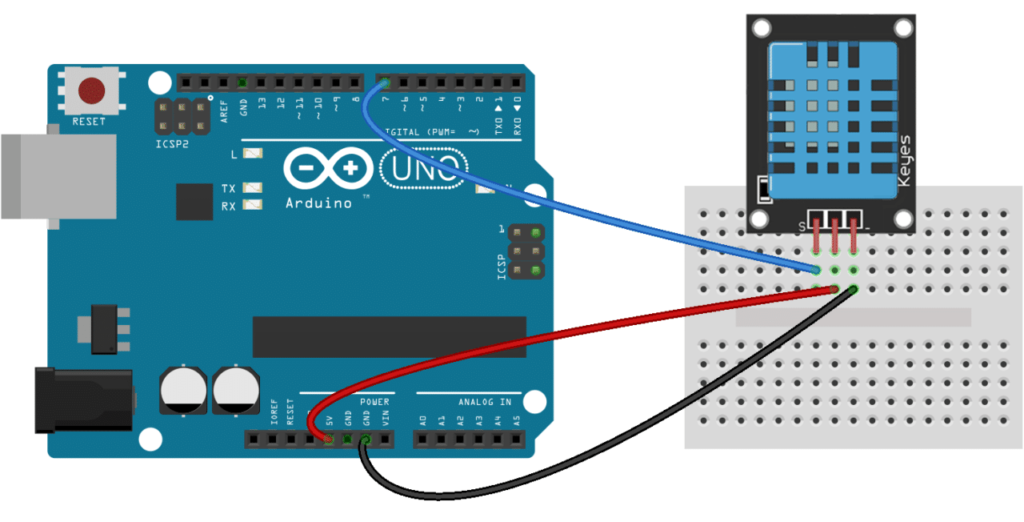
DHT11 Arduino Wiring
7-Segment Display with Switch/Case
int a = 6;
int b = 5;
int c = 2;
int d = 3;
int e = 4;
int f = 7;
int g = 8;
int p = 9;
void setup() {
pinMode(c, OUTPUT);
pinMode(d, OUTPUT);
pinMode(e, OUTPUT);
pinMode(b, OUTPUT);
pinMode(a, OUTPUT);
pinMode(f, OUTPUT);
pinMode(g, OUTPUT);
pinMode(p, OUTPUT);
pinMode(A1, INPUT);
pinMode(A2, INPUT);
Serial.begin(9600);
}
int num = 1;
int xvalue;
void loop() {
LEDplay(num);
delay(1000);
xvalue = analogRead(A1);
if(xvalue > 1000){
num = num+1;
num = num%10;
}
if(xvalue < 10){
num = num-1;
num = num%10;
}
if(num < 0){
num = 9;
}
}
void LEDplay(int num){
switch (num) {
case 0:
zero();
break;
case 1:
one();
break;
case 2:
two();
break;
case 3:
three();
break;
case 4:
four();
break;
case 5:
five();
break;
case 6:
six();
break;
case 7:
seven();
break;
case 8:
eight();
break;
case 9:
nine();
break;
default:
//do nothing
break;
}
}
void one(){
digitalWrite(a, LOW);
digitalWrite(b, HIGH);
digitalWrite(c, HIGH);
digitalWrite(d, LOW);
digitalWrite(e, LOW);
digitalWrite(f, LOW);
digitalWrite(g, LOW);
digitalWrite(p, LOW);
}
void two(){
digitalWrite(a, HIGH);
digitalWrite(b, HIGH);
digitalWrite(c, LOW);
digitalWrite(d, HIGH);
digitalWrite(e, HIGH);
digitalWrite(f, LOW);
digitalWrite(g, HIGH);
digitalWrite(p, LOW);
}
void three(){
digitalWrite(a, HIGH);
digitalWrite(b, HIGH);
digitalWrite(c, HIGH);
digitalWrite(d, HIGH);
digitalWrite(e, LOW);
digitalWrite(f, LOW);
digitalWrite(g, HIGH);
digitalWrite(p, LOW);
}
void four(){
digitalWrite(a, LOW);
digitalWrite(b, HIGH);
digitalWrite(c, HIGH);
digitalWrite(d, LOW);
digitalWrite(e, LOW);
digitalWrite(f, HIGH);
digitalWrite(g, HIGH);
digitalWrite(p, LOW);
}
void five(){
digitalWrite(a, HIGH);
digitalWrite(b, LOW);
digitalWrite(c, HIGH);
digitalWrite(d, HIGH);
digitalWrite(e, LOW);
digitalWrite(f, HIGH);
digitalWrite(g, HIGH);
digitalWrite(p, LOW);
}
void six(){
digitalWrite(a, HIGH);
digitalWrite(b, LOW);
digitalWrite(c, HIGH);
digitalWrite(d, HIGH);
digitalWrite(e, HIGH);
digitalWrite(f, HIGH);
digitalWrite(g, HIGH);
digitalWrite(p, LOW);
}
void seven(){
digitalWrite(a, HIGH);
digitalWrite(b, HIGH);
digitalWrite(c, HIGH);
digitalWrite(d, LOW);
digitalWrite(e, LOW);
digitalWrite(f, LOW);
digitalWrite(g, LOW);
digitalWrite(p, LOW);
}
void eight(){
digitalWrite(a, HIGH);
digitalWrite(b, HIGH);
digitalWrite(c, HIGH);
digitalWrite(d, HIGH);
digitalWrite(e, HIGH);
digitalWrite(f, HIGH);
digitalWrite(g, HIGH);
digitalWrite(p, LOW);
}
void nine(){
digitalWrite(a, HIGH);
digitalWrite(b, HIGH);
digitalWrite(c, HIGH);
digitalWrite(d, LOW);
digitalWrite(e, LOW);
digitalWrite(f, HIGH);
digitalWrite(g, HIGH);
digitalWrite(p, LOW);
}
void zero(){
digitalWrite(a, HIGH);
digitalWrite(b, HIGH);
digitalWrite(c, HIGH);
digitalWrite(d, HIGH);
digitalWrite(e, HIGH);
digitalWrite(f, HIGH);
digitalWrite(g, LOW);
digitalWrite(p, LOW);
}
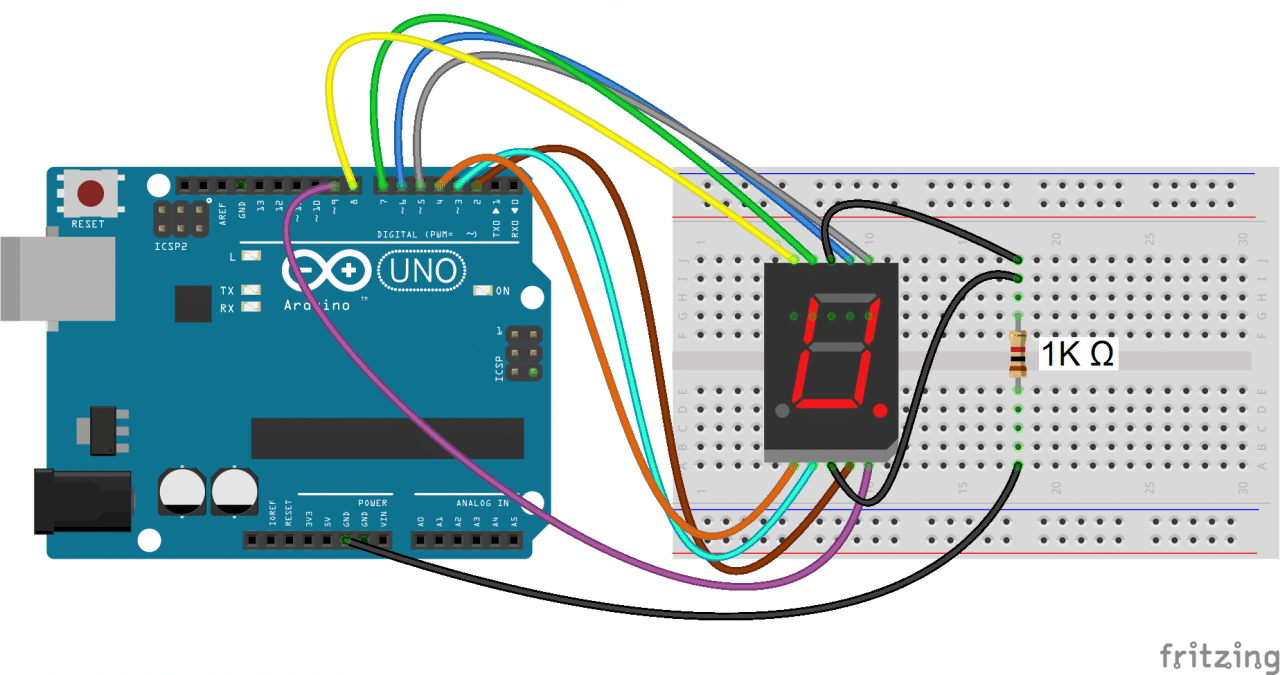
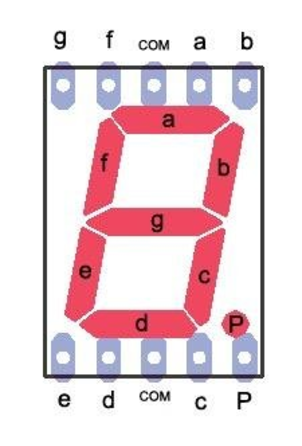
7-Segment Display Wiring Arduino
Arduino Joystick Demo
int joyPin1 = A0; // slider variable connected to analog pin 0
int joyPin2 = A1; // slider variable connected to analog pin 1
int value1 = 0; // variable to read the value from the analog pin 0
int value2 = 0; // variable to read the value from the analog pin 1
void setup() {
pinMode(joyPin1, INPUT);
pinMode(joyPin2, INPUT);
Serial.begin(9600);
}
void loop() {
value1 = analogRead(joyPin1);
value2 = analogRead(joyPin2);
delay(100);
Serial.print("Pin1: ");
Serial.print(value1);
Serial.print(" Pin2: ");
Serial.println(value2);
}
Arduino Serial Demo
void setup() {
Serial.begin(9600);
}
int i = 1;
void loop() {
Serial.println("Each line of code will be delayed by 1 second");
delay(1000);
Serial.println("Also, integer i will count upwards by one!");
delay(1000);
Serial.println(i);
i = i+1;
}
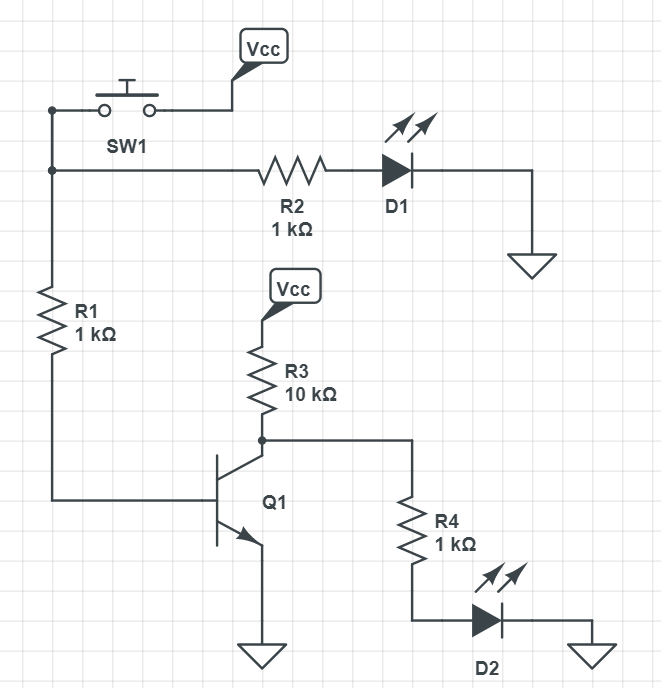
Building a NOT Gate

Current Bogie Code *Change Port Definitions*
#define left1 32
#define left2 26
#define right2 30
#define right1 28
#define eLeft A8
#define eRight A9
//********************************************************************************************************************************************************************************************
#include <LiquidCrystal.h>
int lcd_key = 0;
int adc_key_in = 0;
// select the pins used on the LCD panel
LiquidCrystal lcd(8, 9, 4, 5, 6, 7);
//********************************************************************************************************************************************************************************************
String data="";
int mark = 0;
boolean Mark_Start=false;
boolean valid=false;
String GGAUTCtime,GGAlatitude,GGAlongitude,GPStatus,SatelliteNum,HDOPfactor,Height,
PositionValid,RMCUTCtime,RMClatitude,RMClongitude,Speed,Direction,Date,Declination,Mode;
//********************************************************************************************************************************************************************************************
int longitude, latitude;
//********************************************************************************************************************************************************************************************
void setup() {
pinMode(right1, OUTPUT);
pinMode(right2, OUTPUT);
pinMode(left1, OUTPUT);
pinMode(left2, OUTPUT);
pinMode(eLeft, OUTPUT);
pinMode(eRight, OUTPUT);
digitalWrite(eLeft, HIGH);
digitalWrite(eRight, HIGH);
//********************************************************************************************************************************************************************************************
Serial.begin(9600);
Serial1.begin(9600);
Serial.println(0);
delay(1000);
pinMode(21, OUTPUT);
digitalWrite (21, HIGH);
pinMode(20, OUTPUT);
digitalWrite (20, LOW);
lcd.begin(16, 2); // start the library
lcd.setCursor(0,0);
lcd.print("Initializing GPS"); // print a simple message
}
bool clipped = 0;
//********************************************************************************************************************************************************************************************
void loop() {
gpsBoi();
clipped = 0;
}
//********************************************************************************************************************************************************************************************
void turnLeft(int speed){
analogWrite(left2, speed);
digitalWrite(left1, LOW);
analogWrite(right1, speed);
digitalWrite(right2, LOW);
}
//******************************
void turnRight(int speed){
analogWrite(left1, speed);
digitalWrite(left2, LOW);
analogWrite(right2, speed);
digitalWrite(right1, LOW);
}
//******************************
void moveForwards(int speed){
analogWrite(right1, speed);
digitalWrite(right2, LOW);
analogWrite(left1, speed);
digitalWrite(left2, LOW);
}
//******************************
void moveBackwards(int speed){
analogWrite(right2, speed);
digitalWrite(right1, LOW);
analogWrite(left2, speed);
digitalWrite(left1, LOW);
}
//******************************
void turn90right(){
turnRight(150);
delay(985);
}
void turn90left(){
turnLeft(150);
delay(985);
}
//******************************
void halt(){
digitalWrite(right2, LOW);
digitalWrite(right1, LOW);
digitalWrite(left2, LOW);
digitalWrite(left1, LOW);
}
//******************************
void gpsBoi(){
while (Serial1.available()> 0){
if(Mark_Start){
data=reader();
Serial.println(data);
if(data.equals("GPGGA")){
//Serial.println(1);
GGAUTCtime=reader();
GGAlatitude=reader();
GGAlatitude+=reader();
GGAlongitude=reader();
GGAlongitude+=reader();
GPStatus=reader();
SatelliteNum=reader();
HDOPfactor=reader();
Height=reader();
Mark_Start=false;
valid=true;
data="";
}
else if(data.equals("GPGSA")){
Serial.println(2);
Mark_Start=false;
data="";
}
else if(data.equals("GPGSV")){
Serial.println(3);
Mark_Start=false;
data="";
}
else if(data.equals("GPRMC")){
//Serial.println(4);
RMCUTCtime=reader();
PositionValid=reader();
RMClatitude=reader();
RMClatitude+=reader();
RMClongitude=reader();
RMClongitude+=reader();
Speed=reader();
Direction=reader();
Date=reader();
Declination=reader();
Declination+=reader();
Mode=reader();
valid=true;
Mark_Start=false;
data="";
}
else if(data.equals("GPVTG")){
Serial.println(5);
Mark_Start=false;
data="";
}
else{
Serial.println(6);
Mark_Start=false;
data="";
}
}
if(valid){
if(PositionValid=="A"){
Serial.println("Position Valid");
lcd.clear();
}
else{
Serial.println("Your position is not valid.");
}
//lcd.clear();
clearCoord();
Serial.print("Date:");
Serial.println(Date);
Serial.print("UTCtime:");
Serial.print(RMCUTCtime);
Serial.print(" ");
Serial.println(GGAUTCtime);
Serial.print("Latitude:");
Serial.print(RMClatitude);
lcd.setCursor(0,0);
lcd.print(latitude);
Serial.print(" ");
Serial.println(GGAlatitude);
Serial.print("Longitude:");
Serial.print(RMClongitude);
lcd.setCursor(0,1);
lcd.print(longitude);
Serial.println("LONGITUDE THE REAL ONE");
Serial.println(longitude);
Serial.println("LATITUDE THE REAL ONE");
Serial.println(latitude);
Serial.print(" ");
Serial.println(GGAlongitude);
Serial.print("GPStatus:");
Serial.println(GPStatus);
Serial.print("SatelliteNum:");
Serial.println(SatelliteNum);
Serial.print("HDOPfactor:");
Serial.println(HDOPfactor);
Serial.print("Height:");
Serial.println(Height);
Serial.print("Speed:");
Serial.println(Speed);
Serial.print("Direction:");
Serial.println(Direction);
Serial.print("Declination:");
Serial.println(Declination);
Serial.print("Mode:");
Serial.println(Mode);
valid=false;
}
if(Serial1.find("$")){
Serial.println("capture");
Mark_Start=true;
}
}
}
String reader(){
String value="";
int temp;
startover:
while (Serial1.available() > 0){
delay(2);
temp=Serial1.read();
if((temp==',')||(temp=='*')){
if(value.length()){
//Serial.println("meaningful message");
return value;
}
else {
//Serial.println("empty");
return "";
}
}
else if(temp=='$'){
//Serial.println("failure");
Mark_Start=false;
}
else{
//Serial.println("add");
value+=char(temp);
}
}
while (!(Serial1.available()>0)){
}
goto startover;
}
//******************************
void clearCoord(){
if(clipped == 0){
RMClatitude.remove(RMClatitude.length()-1);
RMClongitude.remove(RMClongitude.length()-1);
RMClatitude.remove(0,5);
RMClongitude.remove(0,6);
latitude = RMClatitude.toInt();
longitude = RMClongitude.toInt();
}
clipped = 1;
}
Rocker-Bogie GPS and Motor Control Code
#define left1 32
#define left2 26
#define right2 30
#define right1 28
#define eLeft A8
#define eRight A9
//********************************************************************************************************************************************************************************************
#include <LiquidCrystal.h>
int lcd_key = 0;
int adc_key_in = 0;
// select the pins used on the LCD panel
LiquidCrystal lcd(8, 9, 4, 5, 6, 7);
//********************************************************************************************************************************************************************************************
String data="";
int mark = 0;
boolean Mark_Start=false;
boolean valid=false;
String GGAUTCtime,GGAlatitude,GGAlongitude,GPStatus,SatelliteNum,HDOPfactor,Height,
PositionValid,RMCUTCtime,RMClatitude,RMClongitude,Speed,Direction,Date,Declination,Mode;
//********************************************************************************************************************************************************************************************
int longitude, latitude;
//********************************************************************************************************************************************************************************************
void setup() {
pinMode(right1, OUTPUT);
pinMode(right2, OUTPUT);
pinMode(left1, OUTPUT);
pinMode(left2, OUTPUT);
pinMode(eLeft, OUTPUT);
pinMode(eRight, OUTPUT);
digitalWrite(eLeft, HIGH);
digitalWrite(eRight, HIGH);
//********************************************************************************************************************************************************************************************
Serial.begin(9600);
Serial1.begin(9600);
Serial.println(0);
delay(1000);
pinMode(21, OUTPUT);
digitalWrite (21, HIGH);
pinMode(20, OUTPUT);
digitalWrite (20, LOW);
lcd.begin(16, 2); // start the library
lcd.setCursor(0,0);
lcd.print("Initializing GPS"); // print a simple message
}
//********************************************************************************************************************************************************************************************
void loop() {
gpsGet();
}
//********************************************************************************************************************************************************************************************
void turnLeft(int speed){
analogWrite(left2, speed);
digitalWrite(left1, LOW);
analogWrite(right1, speed);
digitalWrite(right2, LOW);
}
//******************************
void turnRight(int speed){
analogWrite(left1, speed);
digitalWrite(left2, LOW);
analogWrite(right2, speed);
digitalWrite(right1, LOW);
}
//******************************
void moveForwards(int speed){
analogWrite(right1, speed);
digitalWrite(right2, LOW);
analogWrite(left1, speed);
digitalWrite(left2, LOW);
}
//******************************
void moveBackwards(int speed){
analogWrite(right2, speed);
digitalWrite(right1, LOW);
analogWrite(left2, speed);
digitalWrite(left1, LOW);
}
//******************************
void turn90right(){
turnRight(150);
delay(985);
}
void turn90left(){
turnLeft(150);
delay(985);
}
//******************************
void haltyoudemon(){
digitalWrite(right2, LOW);
digitalWrite(right1, LOW);
digitalWrite(left2, LOW);
digitalWrite(left1, LOW);
}
//******************************
void gpsGet(){
while (Serial1.available()> 0){
if(Mark_Start){
data=reader();
Serial.println(data);
if(data.equals("GPGGA")){
//Serial.println(1);
GGAUTCtime=reader();
GGAlatitude=reader();
GGAlatitude+=reader();
GGAlongitude=reader();
GGAlongitude+=reader();
GPStatus=reader();
SatelliteNum=reader();
HDOPfactor=reader();
Height=reader();
Mark_Start=false;
valid=true;
data="";
}
else if(data.equals("GPGSA")){
Serial.println(2);
Mark_Start=false;
data="";
}
else if(data.equals("GPGSV")){
Serial.println(3);
Mark_Start=false;
data="";
}
else if(data.equals("GPRMC")){
//Serial.println(4);
RMCUTCtime=reader();
PositionValid=reader();
RMClatitude=reader();
RMClatitude+=reader();
RMClongitude=reader();
RMClongitude+=reader();
Speed=reader();
Direction=reader();
Date=reader();
Declination=reader();
Declination+=reader();
Mode=reader();
valid=true;
Mark_Start=false;
data="";
}
else if(data.equals("GPVTG")){
Serial.println(5);
Mark_Start=false;
data="";
}
else{
Serial.println(6);
Mark_Start=false;
data="";
}
}
if(valid){
if(PositionValid=="A"){
Serial.println("Position Valid");
}
else{
Serial.println("Your position is not valid.");
}
lcd.clear();
CoordNum();
Serial.print("Date:");
Serial.println(Date);
Serial.print("UTCtime:");
Serial.print(RMCUTCtime);
Serial.print(" ");
Serial.println(GGAUTCtime);
Serial.print("Latitude:");
Serial.print(RMClatitude);
lcd.setCursor(0,0);
lcd.print(RMClatitude);
Serial.print(" ");
Serial.println(GGAlatitude);
Serial.print("Longitude:");
Serial.print(RMClongitude);
lcd.setCursor(0,1);
lcd.print(RMClongitude);
Serial.print(" ");
Serial.println(GGAlongitude);
Serial.print("GPStatus:");
Serial.println(GPStatus);
Serial.print("SatelliteNum:");
Serial.println(SatelliteNum);
Serial.print("HDOPfactor:");
Serial.println(HDOPfactor);
Serial.print("Height:");
Serial.println(Height);
Serial.print("Speed:");
Serial.println(Speed);
Serial.print("Direction:");
Serial.println(Direction);
Serial.print("Declination:");
Serial.println(Declination);
Serial.print("Mode:");
Serial.println(Mode);
valid=false;
}
if(Serial1.find("$")){
Serial.println("capture");
Mark_Start=true;
}
}
}
String reader(){
String value="";
int temp;
startover:
while (Serial1.available() > 0){
delay(2);
temp=Serial1.read();
if((temp==',')||(temp=='*')){
if(value.length()){
//Serial.println("meaningful message");
return value;
}
else {
//Serial.println("empty");
return "";
}
}
else if(temp=='$'){
//Serial.println("failure");
Mark_Start=false;
}
else{
//Serial.println("add");
value+=char(temp);
}
}
while (!(Serial1.available()>0)){
}
goto startover;
}
//******************************
void CoordNum(){
RMClatitude.remove(RMClatitude.length()-1);
RMClongitude.remove(RMClongitude.length()-1);
latitude = RMClatitude.toInt();
longitude = RMClongitude.toInt();
}