
x = int(input("What is the number to square root?"))
answer = 1
for i in range(2,100):
if x%(i**2) == 0:
x = int(x/i**2)
answer = i*answer
print str(answer) + " rad " + str(x)
Monthly Archives: April 2018
Latitude Longitude Overlay of Central Park
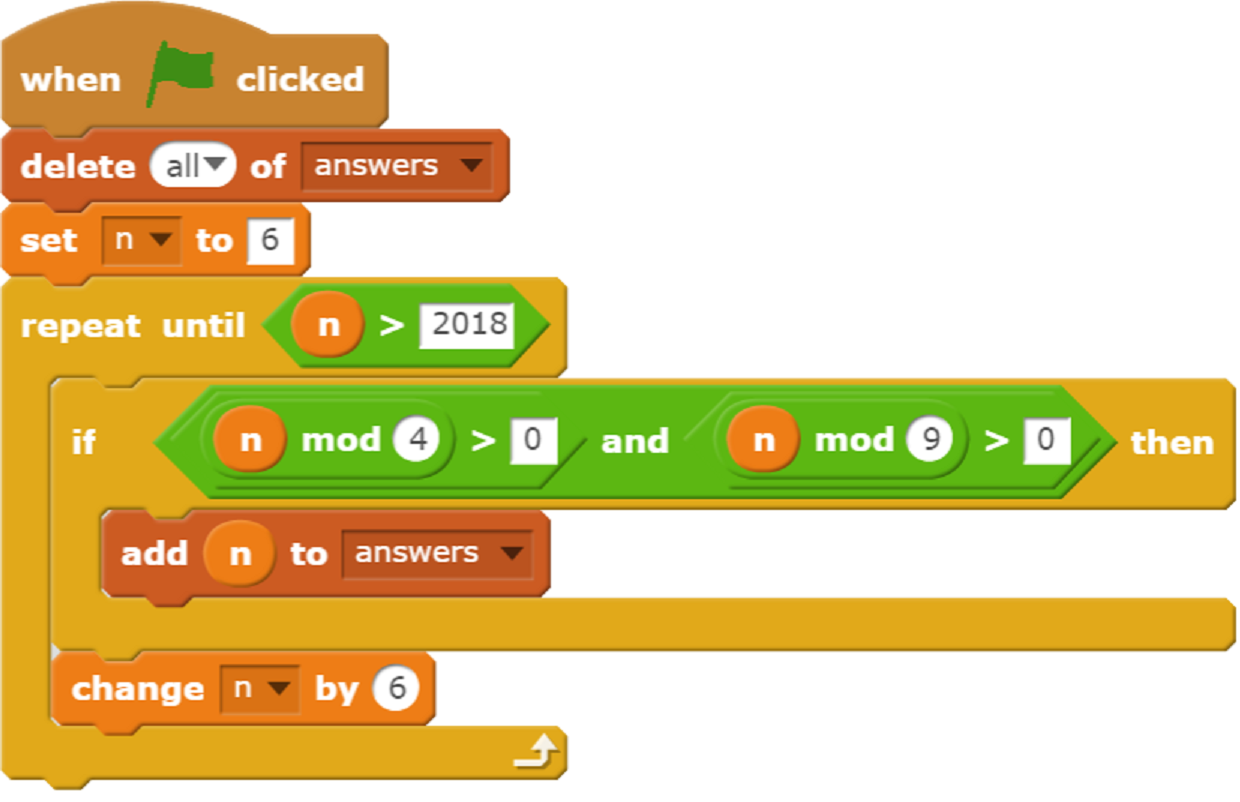
Purple Comet 2018 Middle School Problem 11 Scratch Solution
A short and fast programming solution to Problem 11.
GPS Satellites and DMM Format
Arduino MEGA2560 to Drive U-BLOX NEO-6M GPS Module
1) )Objective:
Use Arduino Mega2560 to get Latitude ,longitude and altitude from U-BLOX NEO-6M GPS module
2)Parts
1 x Arduino Mega2560 board
1 x U-BLOX NEO-6M GPS module

3) About U-BLOX NEO-6M GPS module
The module uses U-BLOX NEO-6M module.The module comes with high-performance ceramic antenna, which is equival of the integrated active antenna.Module comes with EEPROM. All configuration information can be stored in the EEPROM. A variety of configurations to meet your needs.The module also comes with a rechargeable backup battery (to support warm or warm start. after the main power supply power off, back-up battery power can maintain a half hour for GPS receiver data stored).
Features
- Use U-BLOX NEO-6M modular, compact, and excellent performance.
- Comes with ceramic antenna, capability of searching star is quite good.
- You can set various parameters via the serial port, and can be stored in the EEPROM, and easy to use.
- Compatible with 3.3V / 5V level, for easy connection to a variety of microprocessor systems.
- built-in rechargeable backup battery, can retentive ephemeris data
Technical Parameters
| Parameters | Value |
|---|---|
| Power Supply | 3V/5V |
| Model | GPS-NEO-6M-001 |
| Antenna | ceramic antenna |
| Battery | rechargeable battery back-up |
| Signal light | LED light |
| Antenna size | 25*25mm |
| Model size | 25.5mm*31.5mm |
| Mounting Hole | 2mm |
| The default baud rate | 9600 |
| The default output | Compatible with NMEA0183 protocol |
Notice
- Outdoor use
- Note Lightning and waterproof
- Do not support Raspberry Pi 3 B (Because of RPi 3B’s serial port problem, it may have other solution)
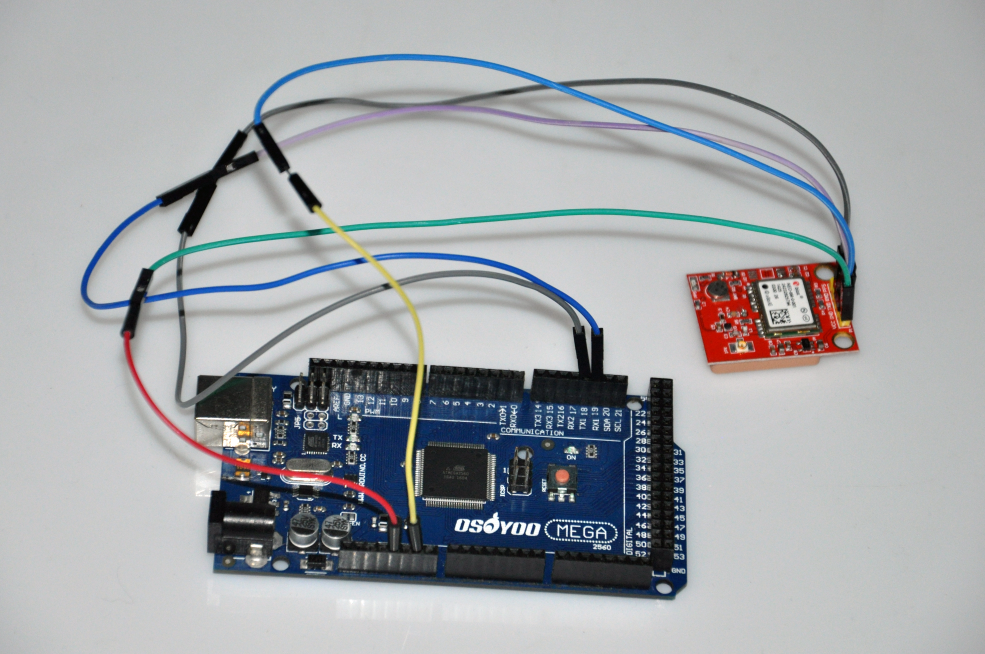
4) Circuit connection and graph
| mega2560 | GPS Module |
|---|---|
| 5V | VCC |
| GND | GND |
| RX1(19) | TXD |
| TX1 (18) | RXD |
4) Source code:
String data="";
int mark = 0;
boolean Mark_Start=false;
boolean valid=false;
String GGAUTCtime,GGAlatitude,GGAlongitude,GPStatus,SatelliteNum,HDOPfactor,Height,
PositionValid,RMCUTCtime,RMClatitude,RMClongitude,Speed,Direction,Date,Declination,Mode;
void setup(){
Serial.begin(9600);
Serial1.begin(9600);
Serial.println(0);
delay(1000);
}
void loop(){
while (Serial1.available()> 0){
if(Mark_Start){
data=reader();
Serial.println(data);
if(data.equals("GPGGA")){
//Serial.println(1);
GGAUTCtime=reader();
GGAlatitude=reader();
GGAlatitude+=reader();
GGAlongitude=reader();
GGAlongitude+=reader();
GPStatus=reader();
SatelliteNum=reader();
HDOPfactor=reader();
Height=reader();
Mark_Start=false;
valid=true;
data="";
}
else if(data.equals("GPGSA")){
Serial.println(2);
Mark_Start=false;
data="";
}
else if(data.equals("GPGSV")){
Serial.println(3);
Mark_Start=false;
data="";
}
else if(data.equals("GPRMC")){
//Serial.println(4);
RMCUTCtime=reader();
PositionValid=reader();
RMClatitude=reader();
RMClatitude+=reader();
RMClongitude=reader();
RMClongitude+=reader();
Speed=reader();
Direction=reader();
Date=reader();
Declination=reader();
Declination+=reader();
Mode=reader();
valid=true;
Mark_Start=false;
data="";
}
else if(data.equals("GPVTG")){
Serial.println(5);
Mark_Start=false;
data="";
}
else{
Serial.println(6);
Mark_Start=false;
data="";
}
}
if(valid){
if(PositionValid=="A"){
Serial.println("Position Valid");
}
else{
Serial.println("Your position is not valid.");
}
Serial.print("Date:");
Serial.println(Date);
Serial.print("UTCtime:");
Serial.print(RMCUTCtime);
Serial.print(" ");
Serial.println(GGAUTCtime);
Serial.print("Latitude:");
Serial.print(RMClatitude);
Serial.print(" ");
Serial.println(GGAlatitude);
Serial.print("Longitude:");
Serial.print(RMClongitude);
Serial.print(" ");
Serial.println(GGAlongitude);
Serial.print("GPStatus:");
Serial.println(GPStatus);
Serial.print("SatelliteNum:");
Serial.println(SatelliteNum);
Serial.print("HDOPfactor:");
Serial.println(HDOPfactor);
Serial.print("Height:");
Serial.println(Height);
Serial.print("Speed:");
Serial.println(Speed);
Serial.print("Direction:");
Serial.println(Direction);
Serial.print("Declination:");
Serial.println(Declination);
Serial.print("Mode:");
Serial.println(Mode);
valid=false;
}
if(Serial1.find("$")){
Serial.println("capture");
Mark_Start=true;
}
}
}
String reader(){
String value="";
int temp;
startover:
while (Serial1.available() > 0){
delay(2);
temp=Serial1.read();
if((temp==',')||(temp=='*')){
if(value.length()){
//Serial.println("meaningful message");
return value;
}
else {
//Serial.println("empty");
return "";
}
}
else if(temp=='$'){
//Serial.println("failure");
Mark_Start=false;
}
else{
//Serial.println("add");
value+=char(temp);
}
}
while (!(Serial1.available()>0)){
}
goto startover;
}
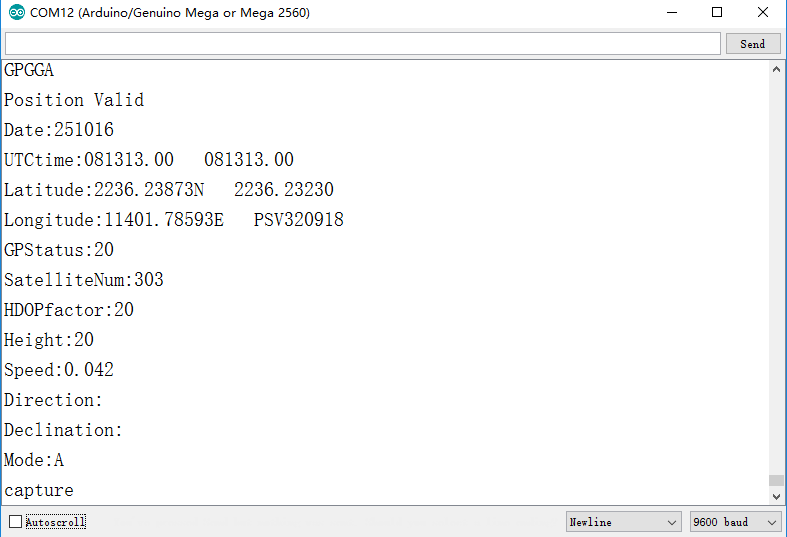
5) Result:
Bring U-BLOX NEO-6M GPS module outdoor, open serial monitor window in Arduino IDE(upper right corner)
You will see following data information:
Bogie Assembly Instructions
Trig Identity (New?)
Can you prove the following trig identity?
![]()
Credit: Epicman314
Boston Dynamics Helping Hand
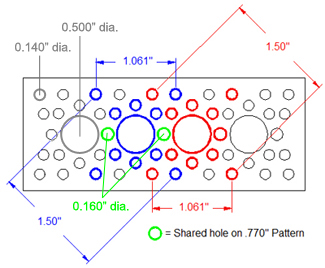
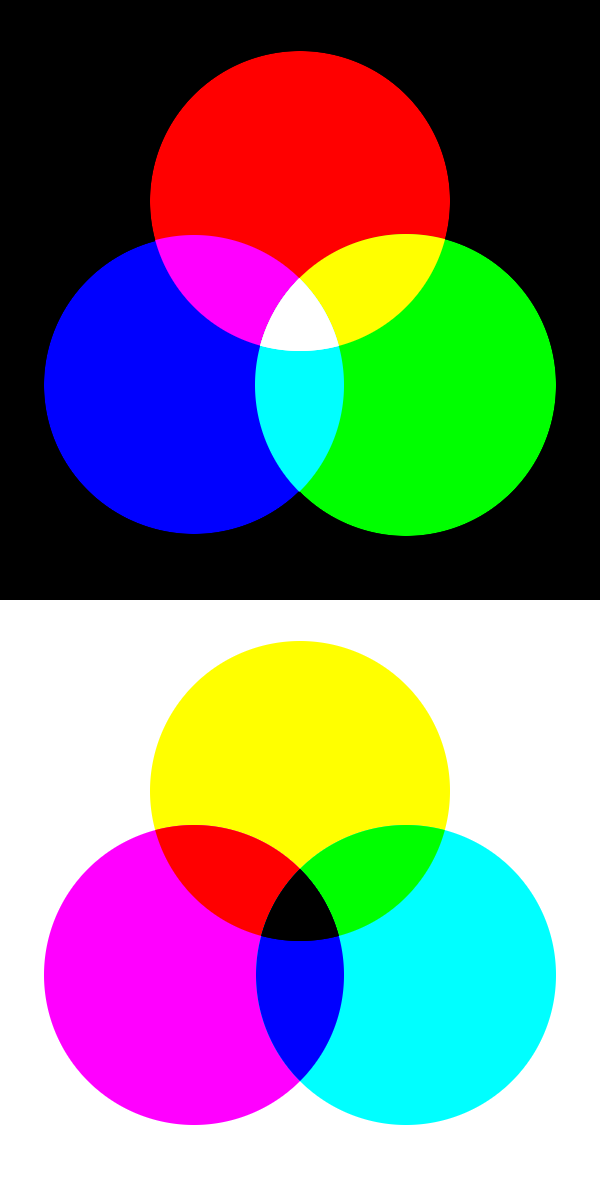
Additive vs Subtractive Color Systems
Plotting in Python Sample
import matplotlib.pyplot as plt
import numpy as np
t = np.arange(0.0, 2.0, 0.01)
s = 1 + np.sin(2*np.pi*t)
plt.plot(t, s)
plt.xlabel('time (s)')
plt.ylabel('voltage (mV)')
plt.title('About as simple as it gets, folks')
plt.grid(True)
plt.savefig("test.png")
plt.show()