
import random
min = 1
max = 6
roll = "yes"
while roll == "yes" or roll == "y":
print "Rolling the dice..."
print "The values are...."
print random.randint(min, max)
print random.randint(min, max)
roll = raw_input("Roll the dice again?")
Category Archives: source code
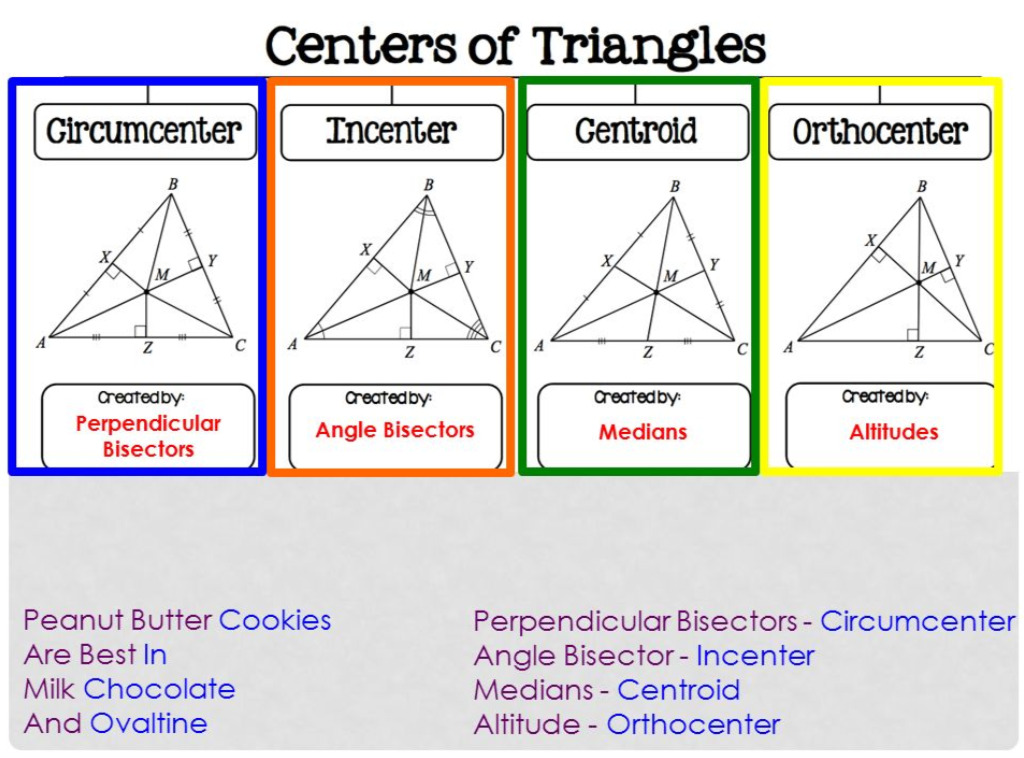
Centers of Triangles
Geometry Definitions, Postulates, and Theorems
Transversals of Parallel Lines
![]()
Python Guessing Game
#importing the time module
import time
#welcoming the user
name = raw_input("What is your name? ")
print "Hello, " + name, "Time to play the guessing game!"
print " "
#wait for 1 second
time.sleep(1)
print "Start guessing..."
time.sleep(0.5)
#here we set the secret
word = "secret"
#creates an variable with an empty value
guesses = ''
#determine the number of turns
turns = 10
# Create a while loop
#check if the turns are more than zero
while turns > 0:
# make a counter that starts with zero
failed = 0
# for every character in secret_word
for char in word:
# see if the character is in the players guess
if char in guesses:
# print then out the character
print char,
else:
# if not found, print a dash
print "_",
# and increase the failed counter with one
failed += 1
# if failed is equal to zero
# print You Won
if failed == 0:
print "You won"
# exit the script
break
print
# ask the user go guess a character
guess = raw_input("guess a character:")
# set the players guess to guesses
guesses += guess
# if the guess is not found in the secret word
if guess not in word:
# turns counter decreases with 1 (now 9)
turns -= 1
# print wrong
print "Wrong"
# how many turns are left
print "You have", + turns, 'more guesses'
# if the turns are equal to zero
if turns == 0:
# print "You Loose"
print "You Loose"
L293N Arduino Motor Control Code – Non-Variable Speed
//L293D
//Motor A
const int motorPin1 = 9; // Pin 14 of L293
const int motorPin2 = 10; // Pin 10 of L293
//Motor B
const int motorPin3 = 6; // Pin 7 of L293
const int motorPin4 = 5; // Pin 2 of L293
//This will run only one time.
void setup(){
//Set pins as outputs
pinMode(motorPin1, OUTPUT);
pinMode(motorPin2, OUTPUT);
pinMode(motorPin3, OUTPUT);
pinMode(motorPin4, OUTPUT);
//Motor Control - Motor A: motorPin1,motorpin2 & Motor B: motorpin3,motorpin4
//This code will turn Motor A clockwise for 2 sec.
analogWrite(motorPin1, 180);
analogWrite(motorPin2, 0);
analogWrite(motorPin3, 180);
analogWrite(motorPin4, 0);
delay(5000);
//This code will turn Motor A counter-clockwise for 2 sec.
analogWrite(motorPin1, 0);
analogWrite(motorPin2, 180);
analogWrite(motorPin3, 0);
analogWrite(motorPin4, 180);
delay(5000);
//This code will turn Motor B clockwise for 2 sec.
analogWrite(motorPin1, 0);
analogWrite(motorPin2, 180);
analogWrite(motorPin3, 180);
analogWrite(motorPin4, 0);
delay(1000);
//This code will turn Motor B counter-clockwise for 2 sec.
analogWrite(motorPin1, 180);
analogWrite(motorPin2, 0);
analogWrite(motorPin3, 0);
analogWrite(motorPin4, 180);
delay(1000);
//And this code will stop motors
analogWrite(motorPin1, 0);
analogWrite(motorPin2, 0);
analogWrite(motorPin3, 0);
analogWrite(motorPin4, 0);
}
void loop(){
}
L298N Arduino Control Code 2 Non-Variable Speed
/* Arduino DC Motor Control - PWM | H-Bridge | L298N - Example 01
by Dejan Nedelkovski, www.HowToMechatronics.com
*/
#define enA 9
#define in1 6
#define in2 7
#define button 4
int rotDirection = 0;
int pressed = false;
void setup() {
pinMode(enA, OUTPUT);
pinMode(in1, OUTPUT);
pinMode(in2, OUTPUT);
pinMode(button, INPUT);
// Set initial rotation direction
digitalWrite(in1, LOW);
digitalWrite(in2, HIGH);
}
void loop() {
int potValue = analogRead(A0); // Read potentiometer value
int pwmOutput = map(potValue, 0, 1023, 0 , 255); // Map the potentiometer value from 0 to 255
analogWrite(enA, pwmOutput); // Send PWM signal to L298N Enable pin
// Read button - Debounce
if (digitalRead(button) == true) {
pressed = !pressed;
}
while (digitalRead(button) == true);
delay(20);
// If button is pressed - change rotation direction
if (pressed == true & rotDirection == 0) {
digitalWrite(in1, HIGH);
digitalWrite(in2, LOW);
rotDirection = 1;
delay(20);
}
// If button is pressed - change rotation direction
if (pressed == false & rotDirection == 1) {
digitalWrite(in1, LOW);
digitalWrite(in2, HIGH);
rotDirection = 0;
delay(20);
}
}
Arduino OSEPP LCD Display 16×2 Sample Code
//Sample using LiquidCrystal library
#include <LiquidCrystal.h>
// select the pins used on the LCD panel
LiquidCrystal lcd(8, 9, 4, 5, 6, 7);
// define some values used by the panel and buttons
int lcd_key = 0;
int adc_key_in = 0;
#define btnRIGHT 0
#define btnUP 1
#define btnDOWN 2
#define btnLEFT 3
#define btnSELECT 4
#define btnNONE 5
// read the buttons
int read_LCD_buttons()
{
adc_key_in = analogRead(0); // read the value from the sensor
// my buttons when read are centered at these valies: 0, 144, 329, 504, 741
// we add approx 50 to those values and check to see if we are close
if (adc_key_in > 1000) return btnNONE; // We make this the 1st option for speed reasons since it will be the most likely result
if (adc_key_in < 50) return btnRIGHT;
if (adc_key_in < 195) return btnUP;
if (adc_key_in < 380) return btnDOWN;
if (adc_key_in < 555) return btnLEFT;
if (adc_key_in < 790) return btnSELECT;
return btnNONE; // when all others fail, return this...
}
void setup()
{
lcd.begin(16, 2); // start the library
lcd.setCursor(0,0);
lcd.print("Push the buttons"); // print a simple message
}
void loop()
{
lcd.setCursor(9,1); // move cursor to second line "1" and 9 spaces over
lcd.print(millis()/1000); // display seconds elapsed since power-up
lcd.setCursor(0,1); // move to the begining of the second line
lcd_key = read_LCD_buttons(); // read the buttons
switch (lcd_key) // depending on which button was pushed, we perform an action
{
case btnRIGHT:
{
lcd.print("RIGHT ");
break;
}
case btnLEFT:
{
lcd.print("LEFT ");
break;
}
case btnUP:
{
lcd.print("UP ");
break;
}
case btnDOWN:
{
lcd.print("DOWN ");
break;
}
case btnSELECT:
{
lcd.print("SELECT");
break;
}
case btnNONE:
{
lcd.print("NONE ");
break;
}
}
}
Python Radical Simplifier
x = int(input("What is the number to square root?"))
answer = 1
for i in range(2,100):
if x%(i**2) == 0:
x = int(x/i**2)
answer = i*answer
print str(answer) + " rad " + str(x)